我校物理学院声学研究所、人工微结构科学与技术协同创新中心程建春和梁彬课题组在二维体系声角动量操控方面取得重要进展,提出并构建了基于声超构材料的单声源声马达,以声波为唯一驱动源实现了对目标载荷的非接触式高速旋转操控。
涡旋声束所携带的轨道角动量具有独特的物理性质,近年来受到了极大关注。涡旋声束与物体相互作用时可以产生远程局域或旋转物体的力矩,利用这种独特的力学效应可以在时间和空间上对微小粒子(如细胞、组织等)实施精确的抓捕、定位以及旋转操控。然而,传统方法通常需要由大量独立控制的换能器单元构造的环形阵列,存在成本高、尺寸大及系统复杂而精准控制困难等问题。到目前为止,如何利用单一声源准确激发并精准调控二维非规则腔体内的声角动量仍然面临极大挑战。
课题组提出了一种在二维体系中"扭曲"单声源动量的物理机制(如图1所示)。通常情况下,当单向的线动量入射到一非规则腔体上时,其内部的本征模式和声场十分复杂,难以在腔体内激发特定的角动量模式而抑制其它非目标模式。课题组通过引入简单的声学硬边界来提供轨道角动量所需的反向波矢分量,严格推导出单一阶数角动量模式激发的必要条件,并利用声超构材料对腔体边界进行合理调控,实现了入射单向线动量到腔内轨道角动量的高效转换,且内部产生的贝塞尔型声场的声强相比入射声可以提高10倍以上。基于该机制,课题组利用高精度3D打印等手段加工制备了具有结构紧凑、高效节能等重要优势的声马达器件(如图2所示),在超声频段和可听声频段内验证了其动力学性能及波场调控性能。实验结果证明了所设计声马达的高效动力输出性能,例如能在声源功率仅为4 W时产生高达1000 转/分钟的旋转速度(如图3所示)。此外,通过对辐射力矩输出和系统参数间关系的定量测算,实现了声马达动力输出和载荷转速的精准调控。
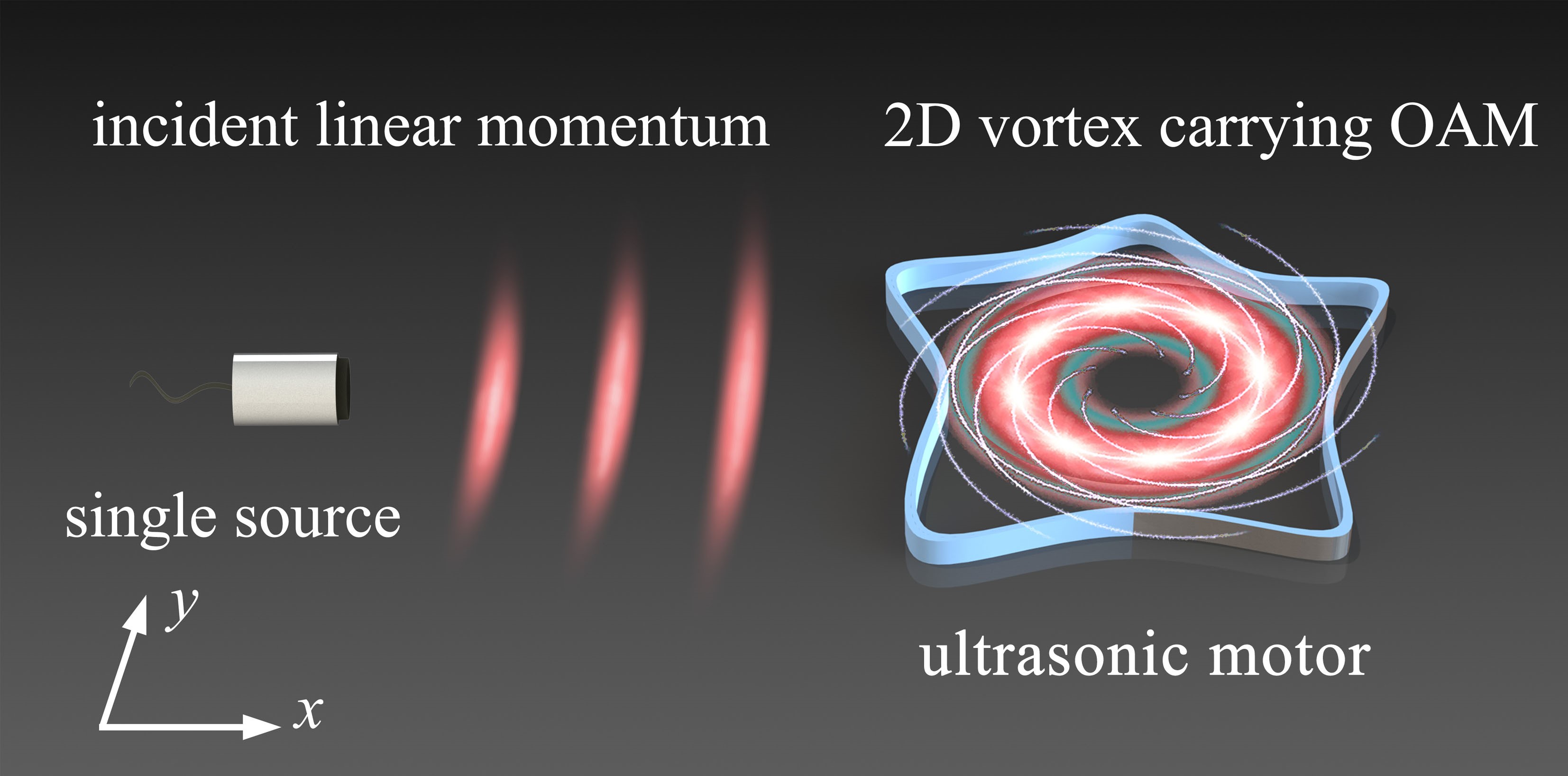
图1. 声马达工作原理图。
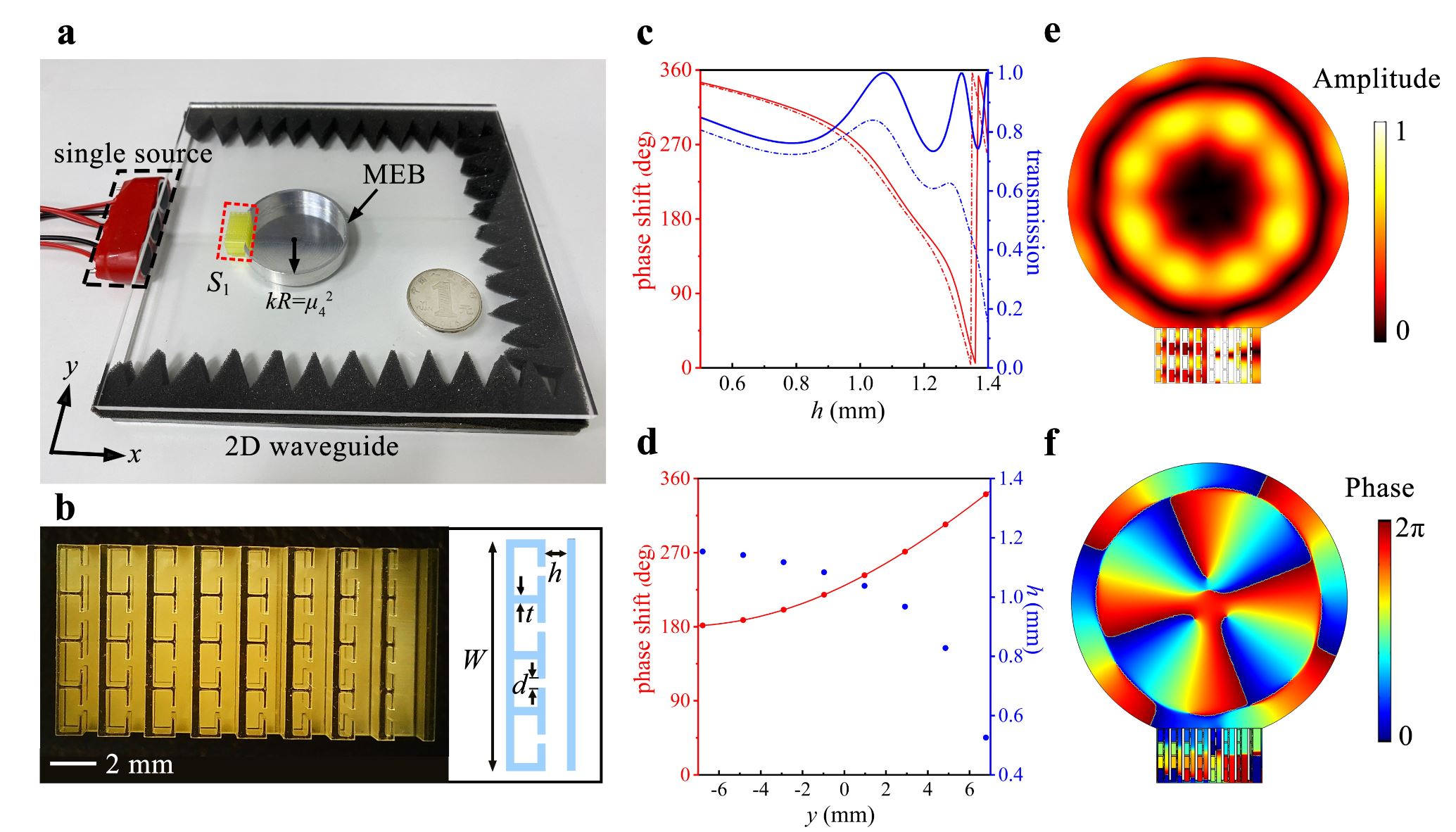
图2. (a) 实验系统图。(b) 3D打印超构单元样品的光学显微图。(c)超构单元声学响应。(d) 腔体边界上的相位和结构参数分布。(e,f)腔体内部声压幅值和相位分布结果。
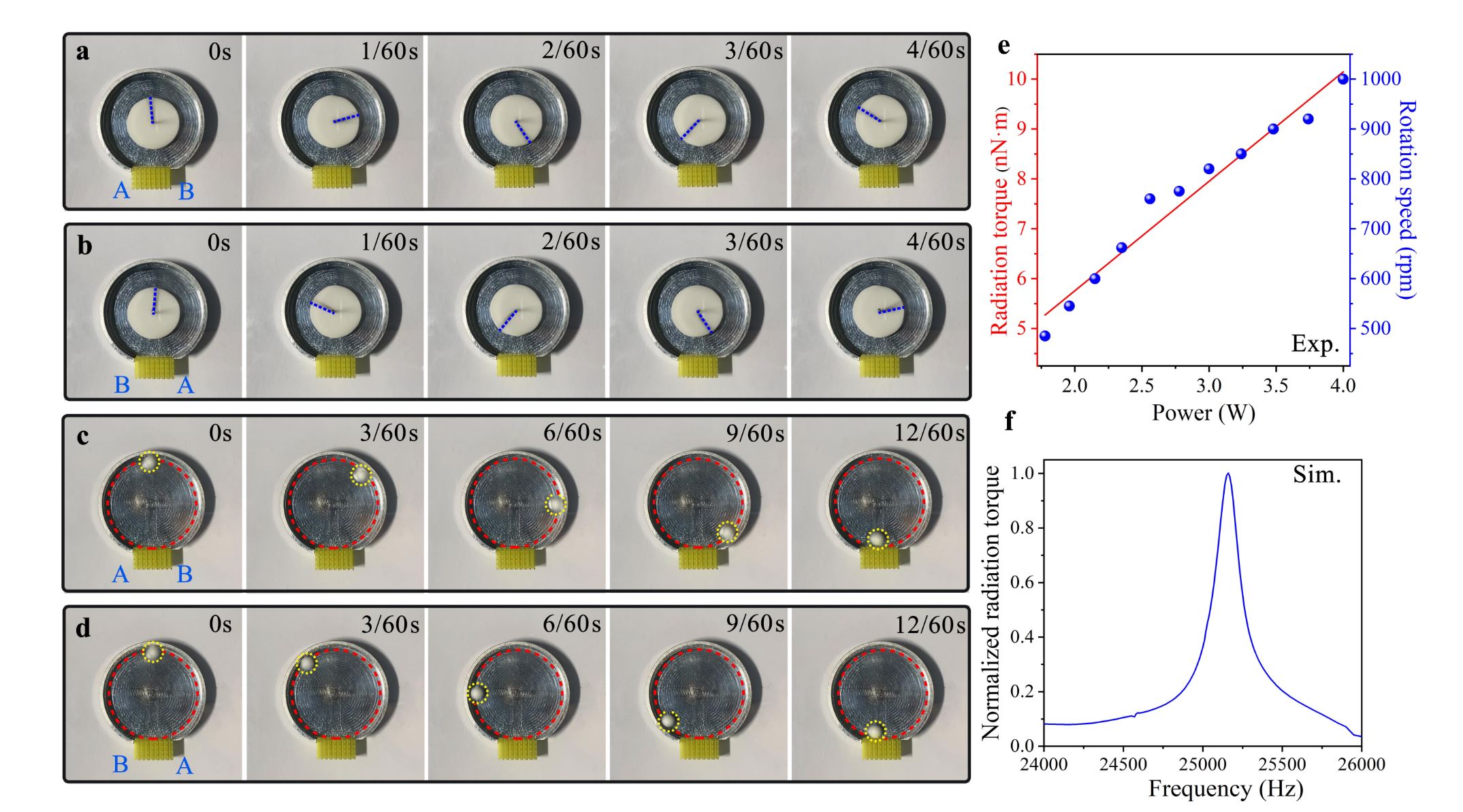
图3. (a-d) 两种载荷在声马达内部的运动情况。(e,f)马达辐射力矩输出和声源功率、工作频率的对应关系。
这种仅需单一声源驱动、适用于任意器件外形的声马达极大地简化了角动量器件的构造,丰富了声人工体系的角动量操控手段,在非接触式粒子操控、片上声通信等领域有重要的应用背景。
该研究成果以"Twisting Linear to Orbital Angular Momentum in an Ultrasonic Motor"为题发表于Advanced Materials上[Adv. Mater. 34, 2201575 (2022),DOI:10.1002/adma.202201575],并被选为封面文章(front cover,图4)。37000cm威尼斯刘京京博士为第一作者,梁彬教授、程建春教授和西班牙马德里卡洛斯三世大学Johan Christensen教授为论文的共同通讯作者。
图4. 《Advanced Materials》34卷28期封面。
该工作得到国家重点研发计划、国家自然科学基金、37000cm威尼斯登峰人才计划、江苏高校优势学科建设工程项目等项目支持。
全文链接:https://onlinelibrary.wiley.com/doi/10.1002/adma.202201575
 English
English


